Конечный автомат пример. Конечный автомат: теория и реализация. Планирование состояний и их переходов
Одним из критериев сложности конечного автомата является число его состояний. Чем меньше это число, тем проще дискретное устройство, реализующее данный автомат. Поэтому одной из важных задач теории конечных автоматов является построение автомата с наименьшим числом состояний.
Поскольку в современных компьютерах любая информация представляется в виде двоичных кодов, то для построения автомата можно использовать элементы, имеющие лишь два различных устойчивых состояния, одно из которых соответствует цифре 0,а другое цифре 1.
Приведём несколько примеров конечных автоматов.
Пример 1. Элемент задержки (элемент памяти).
Элементы задержки представляют собой устройство, имеющее один вход и один выход. Причем значение выходного сигнала в момент времени t совпадает со значением сигнала в предыдущий момент. Схематично элемент задержки можно изобразить следующим образом (рис. 2).
Предположим, что входной и, следовательно, выходной алфавит есть X ={0, 1}, Y ={0, 1}. Тогда Q ={0, 1}. Под состоянием элемента задержки в момент времени t понимается содержание элемента памяти в данный момент. Таким образом q (t )= X (t 1), a Y (t )= q (t )=X (t 1).
Зададим элемент задержки таблицей, где а 1 =0, а 2 =1, q 1 =0, q 2 =1,
(a 1 , q 1)= (0, 0)=0, (a 1 , q 1)= (0, 0)=0;
(a 1 , q 2)= (0, 1)=0, (a 1 , q 2)= (0, 1)=1;
(a 2 , q 1)= (1, 0)=1, (a 2 , q 1)= (1, 0)=0;
(a 2 , q 2)= (1, 1)=1, (a 2 , q 2)= (1, 1)=1;
|
q a | ||
|
=0, =0 |
=0, =1 |
|
|
=1, =0 |
=1, =1 |
Диаграмма Мура изображена на рис. 3

Для представления этого автомата системой булевых функций используем таблицу автомата и вышеизложенный алгоритм. При этом кодирование производить не нужно, так как входной и выходной алфавиты и состояния уже закодированы.
Обратим внимание на то, что т=п=р =2. Тогда k =r =s =1, и поэтому элемент задержки задается двумя функциями и . Таблица истинности этих функций содержит 2 k + r =2 2 =4 строки и k +r +r +s =4 столбца:
|
x |
z | ||
Пример 2. Двоичный сумматор последовательного действия.
Данный сумматор последовательного действия представляет собой устройство, осуществляющее сложение двух чисел в двоичной системе исчисления. На входы сумматора подаются числа х 1 и x 2 , начиная с младших разрядов. На выходе формируется последовательность, соответствующая записи числа х 1 +x 2 в двоичной системе исчисления (рис. 4).

Входной и выходной алфавиты определены однозначно: X ={00; 01; 10; 11}, Y ={0,1}. Множество состояний определяется значением переноса при сложении соответствующих разрядов чисел х 1 и x 2 . Если при сложении некоторых разрядов образовался перенос, то будем считать, что сумматор перешел в состояние q 1 . При отсутствии переноса будем считать, что сумматор находится в состоянии q 0 .
Сумматор задается таблицей.
|
q a |
q 0 |
q 1 |
|
q 0 , 0 |
q 0 , 1 |
|
|
q 0 , 1 |
q 1 , 0 |
|
|
q 0 , 1 |
q 1 , 0 |
|
|
q 1 , 0 |
q 1 , 1 |
Диаграмма Мура сумматора последовательного действия изображена на рис. 5.
Заметим, что входные и выходные символы уже закодированы. Состояния закодируем следующим образом: (q 0)=0, (q 1)=1. Поэтому сумматор последовательного действия задается двумя булевыми функциями, таблица истинности которых следующая:
|
x 1 |
x 2 |
z | ||
 Пример
3.
Схема сравнения на равенство.
Пример
3.
Схема сравнения на равенство.
Схема сравнения на равенств представляет собой устройство, сравнивающее два числа х 1 и x 2 , заданное в двоичной системе исчисления. Это устройство работает следующим образом. На вход устройства последовательно, начиная со старших, подаются разряды чисел х 1 и x 2 . Эти разряды сравниваются. При совпадении разрядов на выходе схемы формируется выходной сигнал 0, в противном случае на выходе появляется сигнал 1. Ясно, что появление 1 в выходной последовательности означает, что сравниваемые числа х 1 и x 2 различны. Если же выходная последовательность является нулевой и ее длина совпадает с числом разрядов сравниваемых чисел, то х 1 и x 2 .
Для этого автомата X ={00, 01, 10, 11}; Y ={0,1}.
Функционирование схемы определяется двумя состояниями. Состояние q 0 соответствует равенству сравниваемых в данный момент разрядов. При этом автомат остается в этом же состоянии. Если в следующий момент сравниваемые разряды будут различны, то автомат перейдет в новое состояние q 1 и в нем остается, так как это означает, что числа различны. Таким образом, схему сравнения можно задать таблицей:
|
q x |
q 0 |
q 1 |
|
q 0 , 0 |
q 1 , 1 |
|
|
q 1 , 1 |
q 1 , 1 |
|
|
q 1 , 1 |
q 1 , 1 |
|
|
q 0 , 0 |
q 1 , 1 |
Диаграмма Мура схемы сравнения на равенство изображена на рис. 6.

Кодирование состояний произведем следующим образом: (q 0)=0, (q 1)=1. Автомат будет задаваться двумя функциями.
|
x 1 |
x 2 |
z | ||
Пример 4. Схема сравнения на неравенство.
Схема сравнения на неравенство представляет собой устройство, позволяющее выяснить, равны ли сравниваемые х 1 и x 2 , и если они не равны, выяснить, какое из них больше другого. Это устройство имеет два входа и два выхода. Выходные сигналы y 1 (t ) и y 2 (t )определяются по следующим правилам:
y 1 (t )=y 2 (t )=0, если x 1 (t )=x 2 (t );
y 1 (t )=1, y 2 (t )=0, если x 1 (t )>x 2 (t ), то есть x 1 (t )=1, x 2 (t )=0;
y 1 (t )=0, y 2 (t )=1, если x 1 (t )<x 2 (t ), то есть x 1 (t )=0, x 2 (t )=1.
Таким
образом, при подаче на вход схемы
сравнения на неравенство чисел
x
1 =x
1 (l)…x
1 (t
)
и
x
2 =x
2 (l)…x
2 (t
)последовательно
сравниваются разряды этих чисел, начиная
со старших. Выходные сигналы формулируются
согласно вышеуказанным правилам. При
этом, если выходная последовательность
состоит из нулевых пар, то x
1 =x
2 .
Если
первая, отличная от нулевой, пара имеет
вид
 ,
(
,
( )
то x
1 >x
2
(x
1 <x
2).
)
то x
1 >x
2
(x
1 <x
2).
Из описания схемы следует, что
X ={00, 01, 10, 11}, Y ={00, 01, 10}.
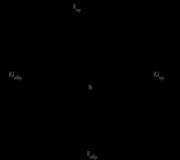
Состояние схемы определяется следующим образом. Предположим, что в начальный момент времени t =1 автомат находится в состоянии q 1 . Если сравниваемые разряды чисел х 1 и х 2 совпадают, то автомат остается в этом состоянии. Заметим, что на выходе при этом появится сигнал 00. Если же разряд числа х 1 будет меньше (больше) соответствующего разряда числа х 2 , то автомат перейдет в состояние q 2 (q 3). При этом на выходе появится сигнал 01 (10). В дальнейшем при подаче оставшихся разрядов чисел х 1 и х 2 на входы автомата автомат будет оставаться в состоянии q 2 (q 3) и вырабатывать выходной символ 10 (01). Из вышеизложенного следует, что схему сравнения на неравенство можно задать таблицей:
|
q x |
q 1 |
q 2 |
q 3 |
|
q 1 , 00 |
q 2 , 01 |
q 3 , 10 |
|
|
q 2 , 01 |
q 2 , 01 |
q 3 , 10 |
|
|
q 3 , 10 |
q 2 , 01 |
q 3 , 10 |
|
|
q 1 , 00 |
q 2 , 01 |
q 3 , 10 |
 Соответствующая
диаграмма Мура изображена на рис. 7.
Соответствующая
диаграмма Мура изображена на рис. 7.
Входной и выходной алфавиты здесь уже закодированы. Состояния q 1 , q 2 и q 3 закодируем: 1 (q 1)=00, (q 2)=01, (q 3)=10.
Следовательно, данную схему можно задать системой, состоящей из четырех булевых функций, которые зависят от четырех переменных. Эти функции частично определены и задаются таблицей истинности
|
x 1 |
x 2 |
z 1 |
z 2 | |||||
В таблице символами * отмечены наборы переменных x 1 , x 2 , z 1 , z 2 , на которых функции 1 , 2 , 1 , 2 не определены. Положим значения функций 1 , 2 , 1 , 2 на этих наборах равными 1.
Конечный автомат - это некоторая абстрактная модель, содержащая конечное число состояний чего-либо. Используется для представления и управления потоком выполнения каких-либо команд. Конечный автомат идеально подходит для реализации искусственного интеллекта в играх, получая аккуратное решение без написания громоздкого и сложного кода. В данной статье мы рассмотрим теорию, а также узнаем, как использовать простой и основанный на стеке конечный автомат.
Мы уже публиковали серию статей по написанию искусственного интеллекта при помощи конечного автомата. Если вы еще не читали эту серию, то можете сделать это сейчас:
Что такое конечный автомат?
Конечный автомат (или попросту FSM - Finite-state machine) это модель вычислений, основанная на гипотетической машине состояний. В один момент времени только одно состояние может быть активным. Следовательно, для выполнения каких-либо действий машина должна менять свое состояние.
Конечные автоматы обычно используются для организации и представления потока выполнения чего-либо. Это особенно полезно при реализации ИИ в играх. Например, для написания «мозга» врага: каждое состояние представляет собой какое-то действие (напасть, уклониться и т. д.).
Конечный автомат можно представить в виде графа, вершины которого являются состояниями, а ребра - переходы между ними. Каждое ребро имеет метку, информирующую о том, когда должен произойти переход. Например, на изображении выше видно, что автомат сменит состояние «wander» на состояние «attack» при условии, что игрок находится рядом.
Планирование состояний и их переходов
Реализация конечного автомата начинается с выявления его состояний и переходов между ними. Представьте себе конечный автомат, описывающий действия муравья, несущего листья в муравейник:

Отправной точкой является состояние «find leaf», которое остается активным до тех пор, пока муравей не найдет лист. Когда это произойдет, то состояние сменится на «go home». Это же состояние останется активным, пока наш муравей не доберется до муравейника. После этого состояние вновь меняется на «find leaf».
Если состояние «find leaf» активно, но курсор мыши находится рядом с муравьем, то состояние меняется на «run away». Как только муравей будет в достаточно безопасном расстоянии от курсора мыши, состояние вновь сменится на «find leaf».
Обратите внимание на то, что при направлении домой или из дома муравей не будет бояться курсора мыши. Почему? А потому что нет соответствующего перехода.
![]()
Реализация простого конечного автомата
Конечный автомат можно реализовать при помощи одного класса. Назовем его FSM. Идея состоит в том, чтобы реализовать каждое состояние как метод или функцию. Также будем использовать свойство activeState для определения активного состояния.
Public class FSM { private var activeState:Function; // указатель на активное состояние автомата public function FSM() { } public function setState(state:Function) :void { activeState = state; } public function update() :void { if (activeState != null) { activeState(); } } }
Всякое состояние есть функция. Причем такая, что она будет вызываться при каждом обновлении кадра игры. Как уже говорилось, в activeState будет храниться указатель на функцию активного состояния.
Метод update() класса FSM должен вызываться каждый кадр игры. А он, в свою очередь, будет вызывать функцию того состояния, которое в данный момент является активным.
Метод setState() будет задавать новое активное состояние. Более того, каждая функция, определяющая какое-то состояние автомата, не обязательно должна принадлежать классу FSM - это делает наш класс более универсальным.
Использование конечного автомата
Давайте реализуем ИИ муравья. Выше мы уже показывали набор его состояний и переходов между ними. Проиллюстрируем их еще раз, но в этот раз сосредоточимся на коде.

Наш муравей представлен классом Ant , в котором есть поле brain . Это как раз экземпляр класса FSM .
Public class Ant { public var position:Vector3D; public var velocity:Vector3D; public var brain:FSM; public function Ant(posX:Number, posY:Number) { position = new Vector3D(posX, posY); velocity = new Vector3D(-1, -1); brain = new FSM(); // Начинаем с поиска листка. brain.setState(findLeaf); } /** * Состояние "findLeaf". * Заставляет муравья искать листья. */ public function findLeaf() :void { } /** * Состояние "goHome". * Заставляет муравья идти в муравейник. */ public function goHome() :void { } /** * Состояние "runAway". * Заставляет муравья убегать от курсора мыши. */ public function runAway() :void { } public function update():void { // Обновление конечного автомата. Эта функция будет вызывать // функцию активного состояния: findLeaf(), goHome() или runAway(). brain.update(); // Применение скорости для движения муравья. moveBasedOnVelocity(); } (...) }
Класс Ant также содержит свойства velocity и position . Эти переменные будут использоваться для расчета движения с помощью метода Эйлера . Функция update() вызывается при каждом обновлении кадра игры.
Ниже приводится реализация каждого из методов, начиная с findLeaf() - состояния, ответственного за поиск листьев.
Public function findLeaf() :void { // Перемещает муравья к листу. velocity = new Vector3D(Game.instance.leaf.x - position.x, Game.instance.leaf.y - position.y); if (distance(Game.instance.leaf, this) <= 10) { // Муравей только что подобрал листок, время // возвращаться домой! brain.setState(goHome); } if (distance(Game.mouse, this) <= MOUSE_THREAT_RADIUS) { // Курсор мыши находится рядом. Бежим! // Меняем состояние автомата на runAway() brain.setState(runAway); } }
Состояние goHome() - используется для того, чтобы муравей отправился домой.
Public function goHome() :void { // Перемещает муравья к дому velocity = new Vector3D(Game.instance.home.x - position.x, Game.instance.home.y - position.y); if (distance(Game.instance.home, this) <= 10) { // Муравей уже дома. Пора искать новый лист. brain.setState(findLeaf); } }
И, наконец, состояние runAway() - используется при уворачивании от курсора мыши.
Public function runAway() :void { // Перемещает муравья подальше от курсора velocity = new Vector3D(position.x - Game.mouse.x, position.y - Game.mouse.y); // Курсор все еще рядом? if (distance(Game.mouse, this) > MOUSE_THREAT_RADIUS) { // Нет, уже далеко. Пора возвращаться к поискам листочек. brain.setState(findLeaf); } }
Улучшение FSM: автомат, основанный на стеке
Представьте себе, что муравью на пути домой также нужно убегать от курсора мыши. Вот так будут выглядеть состояния FSM:
![]()
Кажется, что изменение тривиальное. Нет, такое изменение создает нам проблему. Представьте, что текущее состояние это «run away». Если курсор мыши отдаляется от муравья, что он должен делать: идти домой или искать лист?
Решением такой проблемы является конечный автомат, основанный на стеке. В отличие от простого FSM, который мы реализовали выше, данный вид FSM использует стек для управления состояниями. В верхней части стека находится активное состояние, а переходы возникают при добавлении/удалении состояний из стека.

А вот и наглядная демонстрация работы конечного автомата, основанного на стеке:

Реализация FSM, основанного на стеке
Такой конечный автомат может быть реализован так же, как и простой. Отличием будет использование массива указателей на необходимые состояния. Свойство activeState нам уже не понадобится, т.к. вершина стека уже будет указывать на активное состояние.
Public class StackFSM { private var stack:Array; public function StackFSM() { this.stack = new Array(); } public function update() :void { var currentStateFunction:Function = getCurrentState(); if (currentStateFunction != null) { currentStateFunction(); } } public function popState() :Function { return stack.pop(); } public function pushState(state:Function) :void { if (getCurrentState() != state) { stack.push(state); } } public function getCurrentState() :Function { return stack.length > 0 ? stack : null; } }
Обратите внимание, что метод setState() был заменен на pushState() (добавление нового состояния в вершину стека) и popState() (удаление состояния на вершине стека).
Использование FSM, основанного на стеке
Важно отметить, что при использовании конечного автомата на основе стека каждое состояние несет ответственность за свое удаление из стека при отсутствии необходимости в нем. Например, состояние attack() само должно удалять себя из стека в том случае, если враг был уже уничтожен.
Public class Ant { (...) public var brain:StackFSM; public function Ant(posX:Number, posY:Number) { (...) brain = new StackFSM(); // Начинаем с поиска листка brain.pushState(findLeaf); (...) } /** * Состояние "findLeaf". * Заставляет муравья искать листья. */ public function findLeaf() :void { // Перемещает муравья к листу. velocity = new Vector3D(Game.instance.leaf.x - position.x, Game.instance.leaf.y - position.y); if (distance(Game.instance.leaf, this) <= 10) { //Муравей только что подобрал листок, время // возвращаться домой! brain.popState(); // removes "findLeaf" from the stack. brain.pushState(goHome); // push "goHome" state, making it the active state. } if (distance(Game.mouse, this) <= MOUSE_THREAT_RADIUS) { // Курсор мыши рядом. Надо бежать! // Состояние "runAway" добавляется перед "findLeaf", что означает, // что состояние "findLeaf" вновь будет активным при завершении состояния "runAway". brain.pushState(runAway); } } /** * Состояние "goHome". * Заставляет муравья идти в муравейник. */ public function goHome() :void { // Перемещает муравья к дому velocity = new Vector3D(Game.instance.home.x - position.x, Game.instance.home.y - position.y); if (distance(Game.instance.home, this) <= 10) { // Муравей уже дома. Пора искать новый лист. brain.popState(); // removes "goHome" from the stack. brain.pushState(findLeaf); // push "findLeaf" state, making it the active state } if (distance(Game.mouse, this) <= MOUSE_THREAT_RADIUS) { // Курсор мыши рядом. Надо бежать! // Состояние "runAway" добавляется перед "goHome", что означает, // что состояние "goHome" вновь будет активным при завершении состояния "runAway". brain.pushState(runAway); } } /** * Состояние "runAway". * Заставляет муравья убегать от курсора мыши. */ public function runAway() :void { // Перемещает муравья подальше от курсора velocity = new Vector3D(position.x - Game.mouse.x, position.y - Game.mouse.y); // Курсор все еще рядом? if (distance(Game.mouse, this) > MOUSE_THREAT_RADIUS) { // Нет, уже далеко. Пора возвращаться к поискам листочков. brain.popState(); } } (...) }
Вывод
Конечные автоматы, безусловно, полезны для реализации логики искусственного интеллекта в играх. Они могут быть легко представлены в виде графа, что позволяет разработчику увидеть все возможные варианты.
Реализация конечного автомата с функциями-состояниями является простым, но в то же время мощным методом. Даже более сложные переплетения состояний могут быть реализованы при помощи FSM.
Теория автоматов представляет собой раздел дискретной математики, изучающий модели преобразователей дискретной информации. Такими преобразователями являются как реальные устройства (компьютеры, живые организмы), так и воображаемые устройства (аксиоматические теории, математические машины). По сути конечный автомат можно охарактеризовать как устройство М , имеющее входной и выходной каналы при этом в каждый из дискретных моментов времени, называемых тактовыми моментами, оно находится в одном из конечных состояний.
По входному каналу в каждый момент времени t =1, 2, ... в устройство М поступают входные сигналы (из некоторого конечного множества сигналов). Задается закон изменения состояния к следующему моменту времени в зависимости от входного сигнала и состояния устройства в текущий момент времени. Выходной сигнал зависит от состояния и входного сигнала в текущий момент времени (рис. 1).
Конечный автомат является математической моделью реальных дискретных устройств по переработке информации.
Конечным автоматом называется система А= (X , Q , Y , , ), где X , Q , Y - произвольные непустые конечные множества, а и функции, из которых:
множество X ={a 1 , ..., a m } называется входным алфавитом , а его элементы - входными сигналами , их последовательности - входными словами ;
множество Q ={q 1 , ..., q n } называется множеством состояний автомата, а его элементы - состояниями ;
множество Y ={b 1 , ..., b p } называется выходным алфавитом , его элементы - выходными сигналами , их последовательности - выходными словами ;
функция : X Q Q называется функцией переходов ;
функция :X Q Y называется функцией выходов .
Таким образом, (x , q )Q , (x , q )Y для x X , q Q .
С конечным автоматом ассоциируется воображаемое устройство, которое работает следующим образом. Оно может находиться в состоянии из множества Q , воспринимать сигналы из множества X и выдавать сигналы из множества Y .
2. Способы задания конечного автомата
Существует несколько эквивалентных способов задания абстрактных автоматов, среди которых можно назвать три: табличный , геометрический и функциональный .
2.1.Табличное задание автомата
Из определения автомата следует, что его всегда можно задать таблицей с двумя входами, содержащей т строк и п столбцов, где на пересечении столбца q и строки а стоят значения функций (a i , q j ), (a i , q j ).
|
q a |
q 1 |
q j |
q n |
||
|
a 1 |
(a 1 , q 1), (a 1 , q 1) |
(a 1 , q j ), (a 1 , q j ) |
(a 1 , q n ), (a 1 , q n ) |
||
|
a i |
(a i , q 1), (a i , q 1) |
(a i , q j ), (a i , q j ) |
(a i , q n ), (a i , q n ) |
||
|
a m |
(a m , q 1), (a m , q 1) |
(a m , q j ), (a m , q j ) |
(a m , q n ), (a m , q n ) |
2.2. Задание автомата диаграммой Мура
Другой способ задания конечного автомата - графический, то есть с помощью графа. Автомат изображается в виде помеченного ориентированного графа Г (Q , D ) с множеством вершин Q и множеством дуг D ={(q j , (a i , q j ))| q j Q , a i X }, при этом дуга (q j , (a i , q j )) помечается парой (a i , (a i , q j )). Таким образом, при этом способе состояния автомата изображают кружками, в которые вписывают символы состояний q j (j = 1, …, n ). Из каждого кружка проводится т стрелок (ориентированных ребер) взаимно-однозначно соответствующих символам входного алфавита X ={a 1 , ..., a m }. Стрелке, соответствующей букве a i X и выходящей из кружка q j Q , приписывается пара (a i , (a i , q j )), причем эта стрелка ведет в кружок, соответствующий (a i , q j ).
Полученный рисунок называется графом автомата или, диаграммой Мура . Для не очень сложных автоматов этот способ более нагляден, чем табличный.
В статье рассмотрены простые конечные автоматы и их реализация на C++ с помощью switch-конструкций, таблиц времени исполнения и библиотеки Boost Statechart .
Введение
Грубо говоря, конечный автомат (Finite State Machine), глазами пользователя – это черный ящик, в который можно что-то передать и что-то оттуда получить. Это очень удобная абстракция, которая позволяет скрыть сложный алгоритм, кроме того конечные автоматы очень эффективны.
Конечные автоматы изображают в виде диаграмм состоящих из состояний и переходов. Поясню на простом примере:
Как вы наверное догадались – это диаграмма состояний лампочки. Начальное состояние обозначается черным кружком, переходы стрелками, некоторые стрелки подписаны – это события после которых автомат переходит в другое состояние. Итак, сразу из начального состояния, мы попадаем в состояние Light Off – лампа не горит. Если нажать кнопку, то автомат изменит свое состояние и перейдет по стрелке помеченной Push Button , в состояние Light On – лампа горит. Перейти из этого состояния можно опять же по стрелке, после нажатия кнопки, в состояние Light Off .
Также широко используются таблицы переходов:
Практическое применение автоматов
Конечные автоматы широко используются в программировании. Например очень удобно представить работу устройства в виде автомата. Это сделает код проще и позволит легко с ним экспериментировать и поддерживать.
Также конечные автоматы применяют для написания всевозможных парсеров и анализаторов текста, с помощью них можно эффективно проводить поиск подстрок, регулярные выражения тоже транслируются в конечный автомат.
Для примера мы реализуем автомат для подсчета чисел и слов в тексте. Для начала договоримся, что числом будет считаться последовательность цифр от 0 до 9 произвольной длины, окруженная пробельными символами (пробел, табуляция, перевод строки). Словом будет считаться последовательность произвольной длины состоящая из букв и также окруженная пробельными символами.
Рассмотрим диаграмму:

Из начального состояния мы попадаем в состояние Start . Проверяем текущий символ, и если он является буквой, то переходим в состояние Word по стрелке помеченной как Letter . Это состояние предполагает, что в данный момент мы рассматриваем слово, анализ дальнейших символов, либо подтвердит данное предположение, либо опровергнет. Итак, рассматриваем следующий символ, если он является буквой, то состояние не изменяется (обратите внимание на круговую стрелку помеченную как Letter ). Если символ не является буквой, а соответствует пробельному символу, то это означает, что предположение было верным и мы обнаружили слово (делаем переход по стрелке Space в состояние Start ). Если символ не является, ни буквой, ни пробелом, значит мы ошиблись в предположении и последовательность которую мы рассматриваем, не является словом (переходим по стрелке Unknown в состояние Skip ).
В состоянии Skip мы находимся до тех пор, пока не будет встречен пробельный символ. После того как пробел был обнаружен мы переходим по стрелке Space в состояние Start . Это нужно, чтобы полностью пропустить строку не соответствующую нашему шаблону поиска.
После перехода в состояние Start , поиск цикл повторяется с начала. Ветвь с распознаванием чисел аналогична ветви распознавания слов.
Автомат с использованием switch-инструкций
Первое – возможные состояния:
После чего мы итерируем по строке подсовывая автомату текущий символ. Сам автомат представляет собой инструкцию switch сначала выполняющей переход в секцию текущего состояния. Внутри секции есть конструкция if-else, которая в зависимости от события (пришедшего символа) изменяет текущее состояние:
| const size_t length = text.length () ; for (size_t i = 0 ; i ! = length; ++ i) { const char current = text[ i] ; switch (state) { case State_Start: if (std:: isdigit (current) ) { state = State_Number; } else if (std:: isalpha (current) ) { state = State_Word; } break ; case State_Number: if (std:: isspace (current) ) { |
Здесь смотрим на диаграмму – текущее состояние Number , событие Space (встречен пробельный символ), а значит найдено число:
| FoundNumber() ; state = State_Start; } else if (! std:: isdigit (current) ) { state = State_Skip; } break ; case State_Word: if (std:: isspace (current) ) { FoundWord() ; state = State_Start; } else if (! std:: isalpha (current) ) { state = State_Skip; } break ; case State_Skip: if (std:: isspace (current) ) { state = State_Start; } break ; } } |
Итог:
Высокая эффективность
Простота реализации для простых алгоритмов
— Тяжело поддерживать
Интерпретация времени выполнения
Идея данного подхода проста – надо создать таблицу переходов, заполнить ее, и потом, при наступлении события, найди в таблице следующее состояние и сделать переход:
| enum Events { Event_Space, Event_Digit, Event_Letter, Event_Unknown } ; void ProcessEvent(Events event) ; ... struct Transition { States BaseState_; Events Event_; States TargetState_; } ; void AddTransition(States fromState, Events event, States toState) ; ... typedef std:: vector < transition> TransitionTable; TransitionTable Transitions_; States CurrentState_; |
Заполнение таблицы:
| AddTransition(State_Start, Event_Digit, State_Number) ; AddTransition(State_Start, Event_Letter, State_Word) ; AddTransition(State_Number, Event_Space, State_Start) ; AddTransition(State_Number, Event_Letter, State_Skip) ; AddTransition(State_Number, Event_Unknown, State_Skip) ; AddTransition(State_Word, Event_Space, State_Start) ; AddTransition(State_Word, Event_Digit, State_Skip) ; AddTransition(State_Word, Event_Unknown, State_Skip) ; AddTransition(State_Skip, Event_Space, State_Start) ; |
Получилось довольно наглядно. Платой за наглядность будет более медленная работа автомата, что впрочем, часто не имеет значения.
Чтобы автомат, при наступлении некоторых событий, мог оповестить некоторый код, можно добавить в структуру с информацией о переходе (Transition ) указатель на функцию (Action ), которая будет вызываться:
| typedef void (DynamicMachine:: * Action) () ; struct Transition { States BaseState_; Events Event_; States TargetState_; Action Action_; } ; ... void AddTransition(States fromState, Events event, States toState, Action action) ; ... AddTransition (State_Number, Event_Space, State_Start, & DynamicMachine:: FoundNumber ) ; |
Итог:
Гибкость и наглядность
Проще поддерживать
— Меньшая производительность по сравнению с switch-блоками
Интерпретация времени исполнения. Оптимизация по скорости
Можно ли объединить наглядность со скоростью? Сделать автомат настолько же эффективным, как автомат на switch-блоках вряд ли удастся, но сократить разрыв можно. Для этого надо из таблицы, построить матрицу, такую, чтобы для получения информации о переходе не выполнять поиск, а сделать выборку по номеру состояния и события:
Достигается результат, за счет расхода памяти.
Итог:
Гибкость, наглядность
Эффективен
— Расход памяти (скорее всего несущественно)
Boost Statechart
Мы обсудили несколько способов самостоятельной реализации конечного автомата. Для разнообразия предлагаю рассмотреть библиотеку для построения автоматов из Boost. Данная библиотека очень мощная, предлагаемые возможности позволяют построить очень сложные конечные автоматы. Мы же рассмотрим ее довольно бегло.
Итак, сначала определим события:
| namespace Events { struct Digit : boost:: statechart :: event < Digit> { } ; struct Letter : boost:: statechart :: event < Letter> { } ; struct Space : boost:: statechart :: event < Space> { } ; struct Unknown : boost:: statechart :: event < Unknown> { } ; } |
Саму машину (обратите внимание, что второй параметр шаблона – начальное состояние):
| struct Machine : boost:: statechart :: state_machine < Machine, States:: Start > { } ; |
И собственно сами состояния. Внутри состояний требуется определить тип описывающий переходы (reactions ), а если переходов несколько, то перечислить их в списке типов boost::mpl::list . Второй параметр шаблона simple_state – тип описывающий машину. Переходы описываются параметрами шаблона transition, парой Событие — Следующее состояние :
| namespace States { struct Start : boost:: statechart :: simple_state < Start, Machine> < boost:: statechart :: transition < Events:: Digit , States:: Number >< Events:: Letter , States:: Word > > reactions; } ; struct Number : boost:: statechart :: simple_state < Number, Machine> { typedef boost:: mpl :: list < boost:: statechart :: transition < Events:: Space , States:: Start > , boost:: statechart :: transition < Events:: Letter , States:: Skip > , boost:: statechart :: transition < Events:: Unknown , States:: Skip > > reactions; } ; struct Word : boost:: statechart :: simple_state < Word, Machine> { typedef boost:: mpl :: list < boost:: statechart :: transition < Events:: Space , States:: Start > , boost:: statechart :: transition < Events:: Digit , States:: Skip > , boost:: statechart :: transition < Events:: Unknown , States:: Skip > > reactions; } ; struct Skip : boost:: statechart :: simple_state < Skip, Machine> { typedef boost:: statechart :: transition < Events:: Space , States:: Start > reactions; } ; } |
Машина построена, осталось только инициализировать ее и можно использовать:
| Machine machine; machine.initiate () ; ... machine .process_event (Events:: Space () ) ; |
Итог:
Гибкость, расширяемость
— Эффективность
Быстродействие
Я написал тестовую программу для проверки быстродействия построенных автоматов. Через автоматы я прогнал текст размером ~17 Мб. Вот результаты прогона:
Loading text Text length: 17605548 bytes 0.19 s Running BoostMachine Words: 998002, numbers: 6816 0.73 s Running DynamicMachine Words: 998002, numbers: 6816 0.56 s Running FastDynamicMachine Words: 998002, numbers: 6816 0.29 s Running SimpleMachine Words: 998002, numbers: 6816 0.20 s
Что осталось не рассмотренным
Неохваченными остались еще несколько реализаций конечных автоматов (рекомендую http://www.rsdn.ru/article/alg/Static_Finite_State_Machine.xml и http://www.rsdn.ru/article/alg/FiniteStateMachine.xml), генераторы строящие автоматы из описаний, библиотека Meta State Machine из Boost версии 1.44.0, а также формальные описания конечных автоматов. Со всем перечисленным любопытный читатель может ознакомиться самостоятельно.